THE TIMELINE
AUGUST 2024 — THE GREAT WHITE BUFFALO
On the heels of two failed projects that wrecked every expectation and every capability I thought I had, I believed I’d finally found my Great White Buffalo — a big-block swapped OBS Bronco backed by a 5-speed. My judgment was completely clouded by visions of third-gear scratches with the windows down.
Reality hit like a sledgehammer the moment the truck arrived. What was sold as “no expense spared” turned out to be a masterclass in destruction. The last owner had wrecked, destroyed, and badly modded the truck in ways I had never witnessed before.
That same week a local kid asked me to look at his project truck. That’s when Nikola Tesla’s words hit me like a brick: I may live to see man-made horrors beyond comprehension. These rides were being totaled by the very people trying to revive them.
At first I went full boomer. Then it hit me — these kids don’t have real Hot Rodders sitting in the garage telling them to put the Sawzall down and learn a few things first. Their dads obviously can’t turn wrenches. Forums? Just 50 Google-search screenshots and zero actual help.
The gut-punch from my destroyed dream truck finally crystallized everything. From that exact moment in August 2024, AutoFreak stopped being a daydream and became a mission.
OCTOBER 2024 – FEBRUARY 2025 — V1: THE MONSTER
The very first system tests began. 48 sensors. 16 compute modules. 4 CPUs. 4 displays. 5 input systems. 3 servos. A massive, ridiculous undertaking.
It worked… kinda. Listening to Elon talk about ruthless simplification — and being dead broke — forced me back to the drawing board again and again. This phase became the genesis of half the systems that will ship in the final product once we’re funded.
MARCH 2025 – OCTOBER 2025 — V2: THE VOLVO XC70 ERA
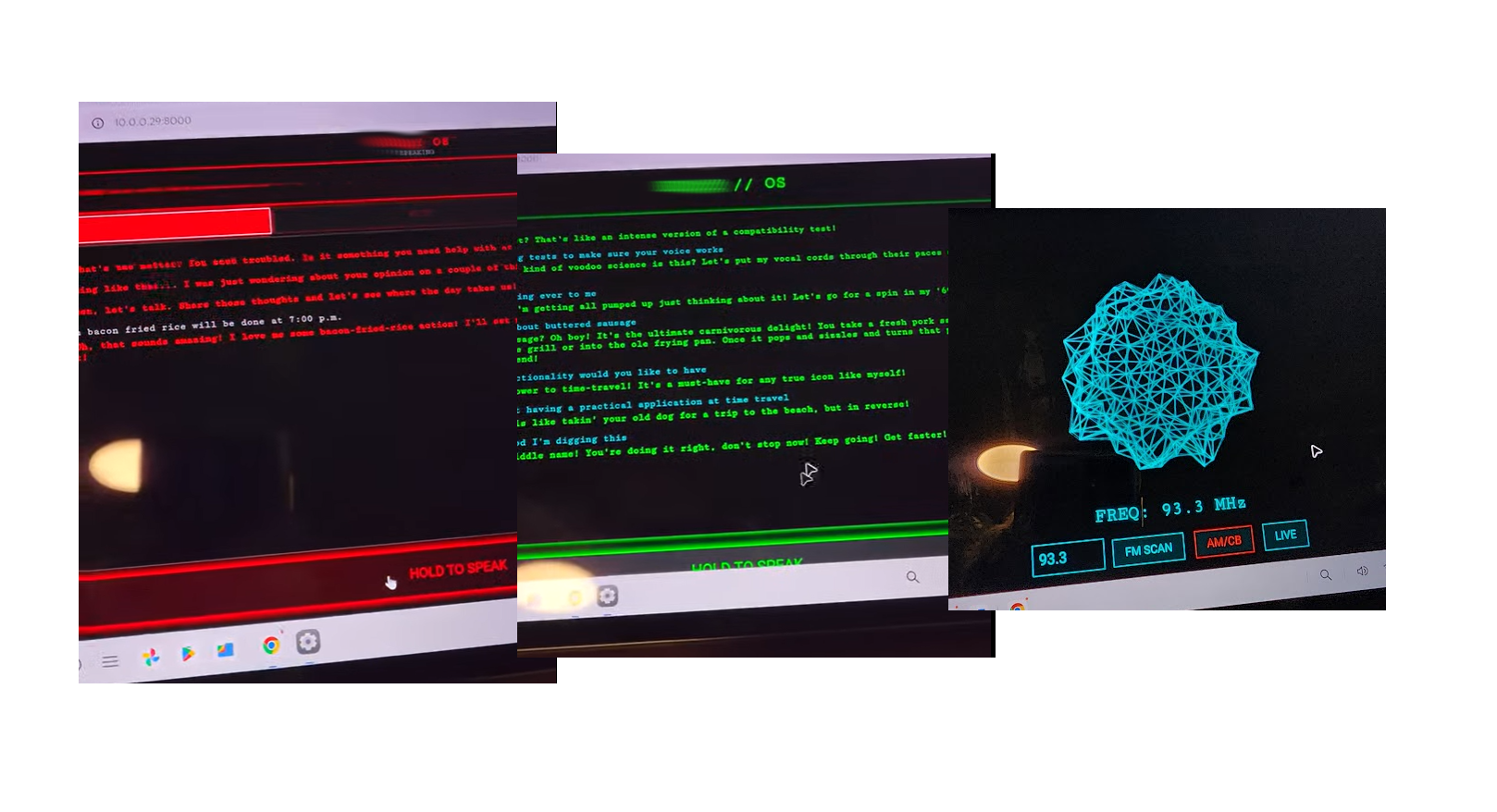
Building and testing different versions of personas, reasoning engines, telemetry, and AutoMCP hardware. Android version, multiple LLMs, real-world road testing.
I went way too deep into the Bronco and burned my entire runway on something that would never pay back. So I pivoted hard. V2 lived inside my daily driver — a 2004 Volvo XC70. Over 10,000 miles of brutal real-world testing. When that Swede finally started talking back to me… holy shit. That was the moment I knew we had lightning in a bottle.

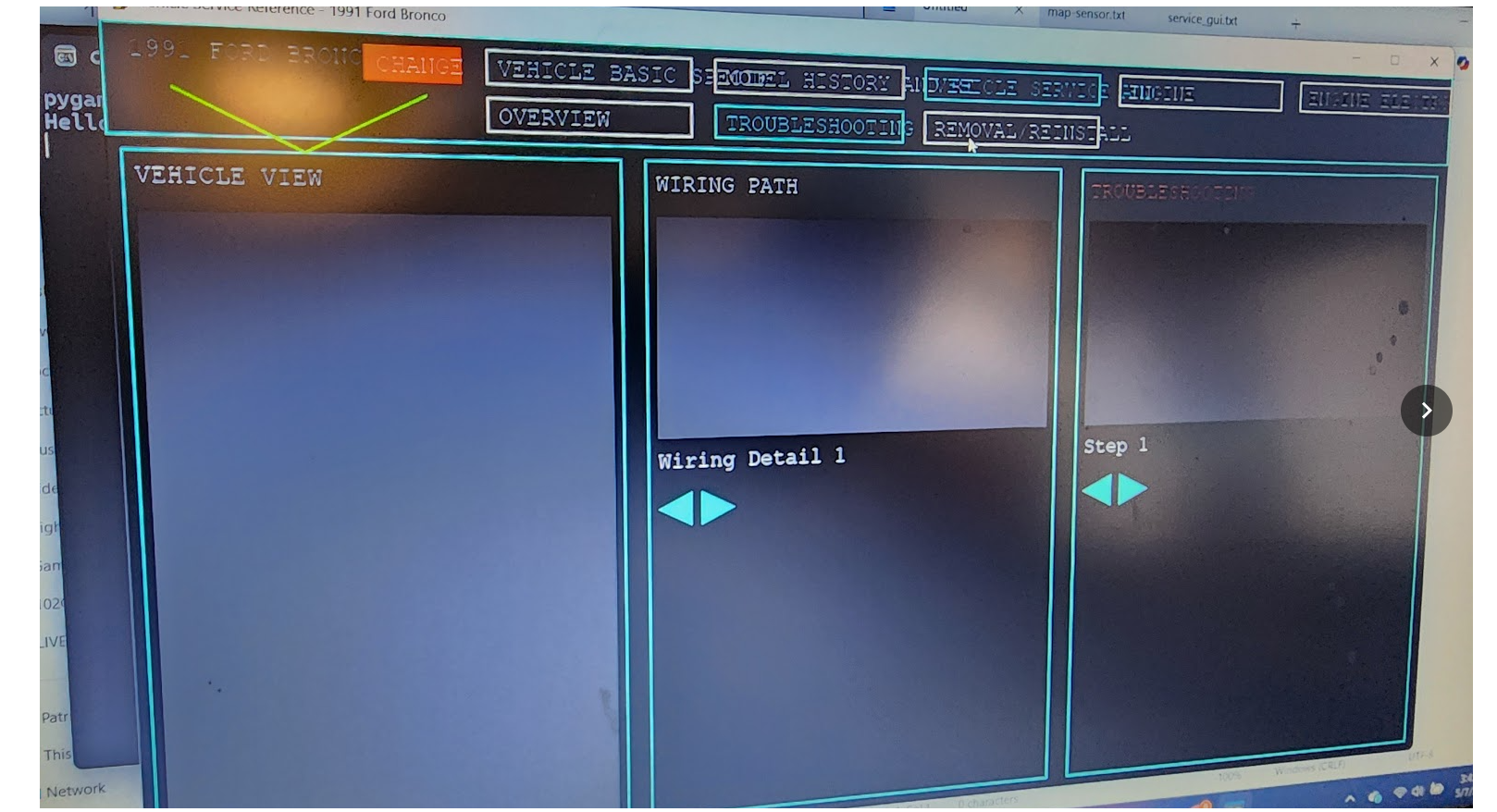
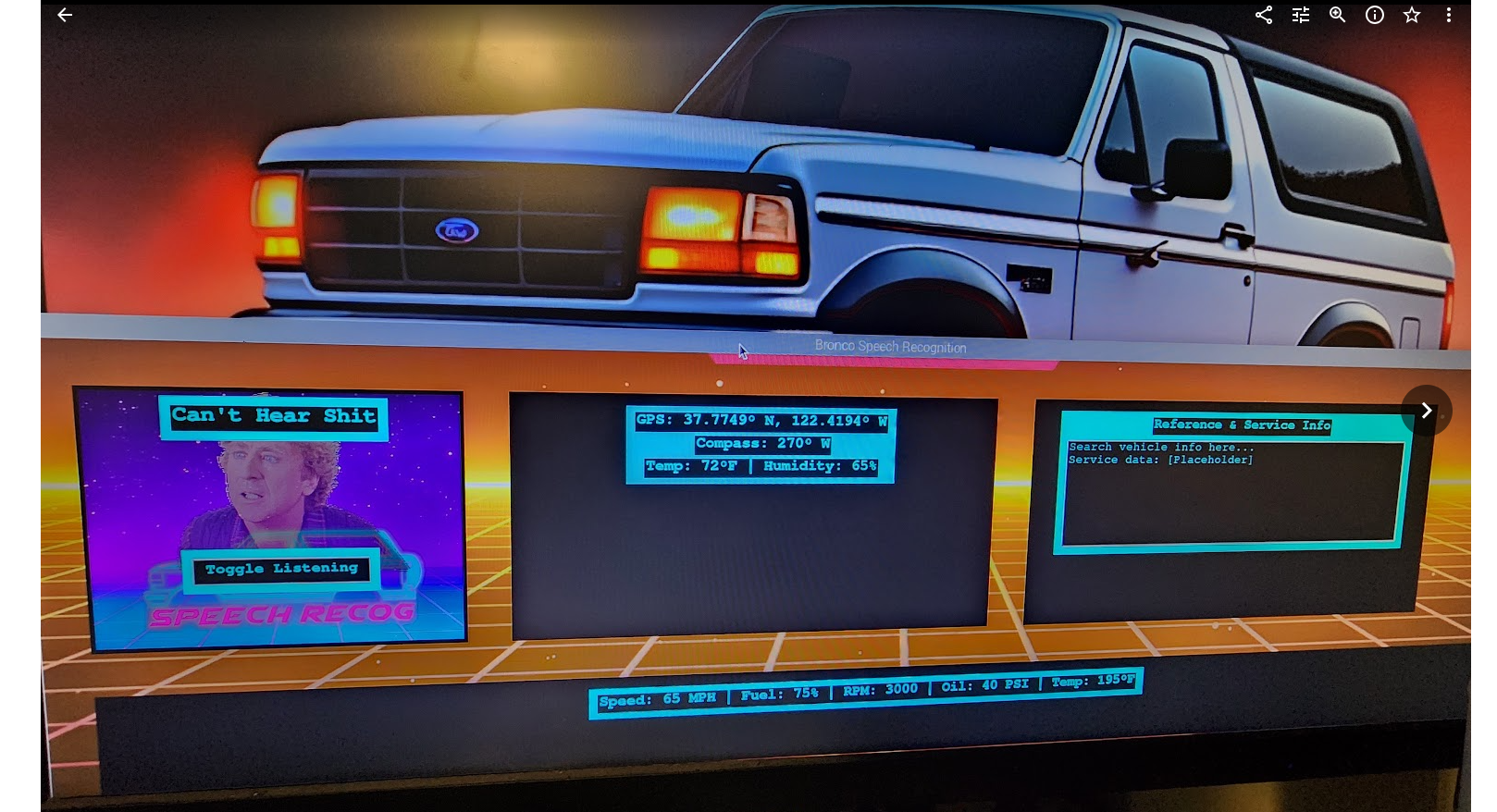
OCTOBER 2025 – FEBRUARY 2026 — STANDALONE LOCAL SYSTEM
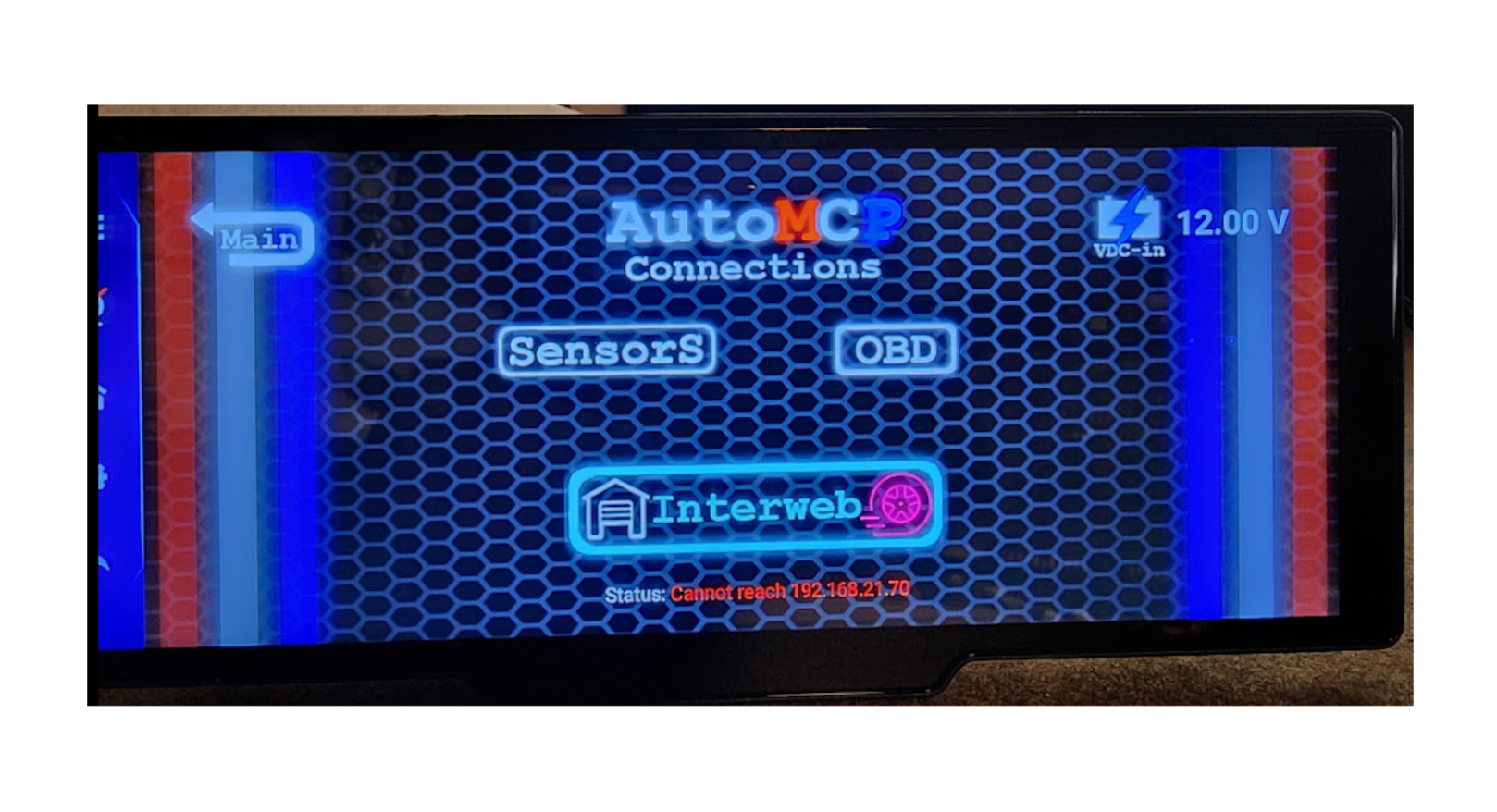
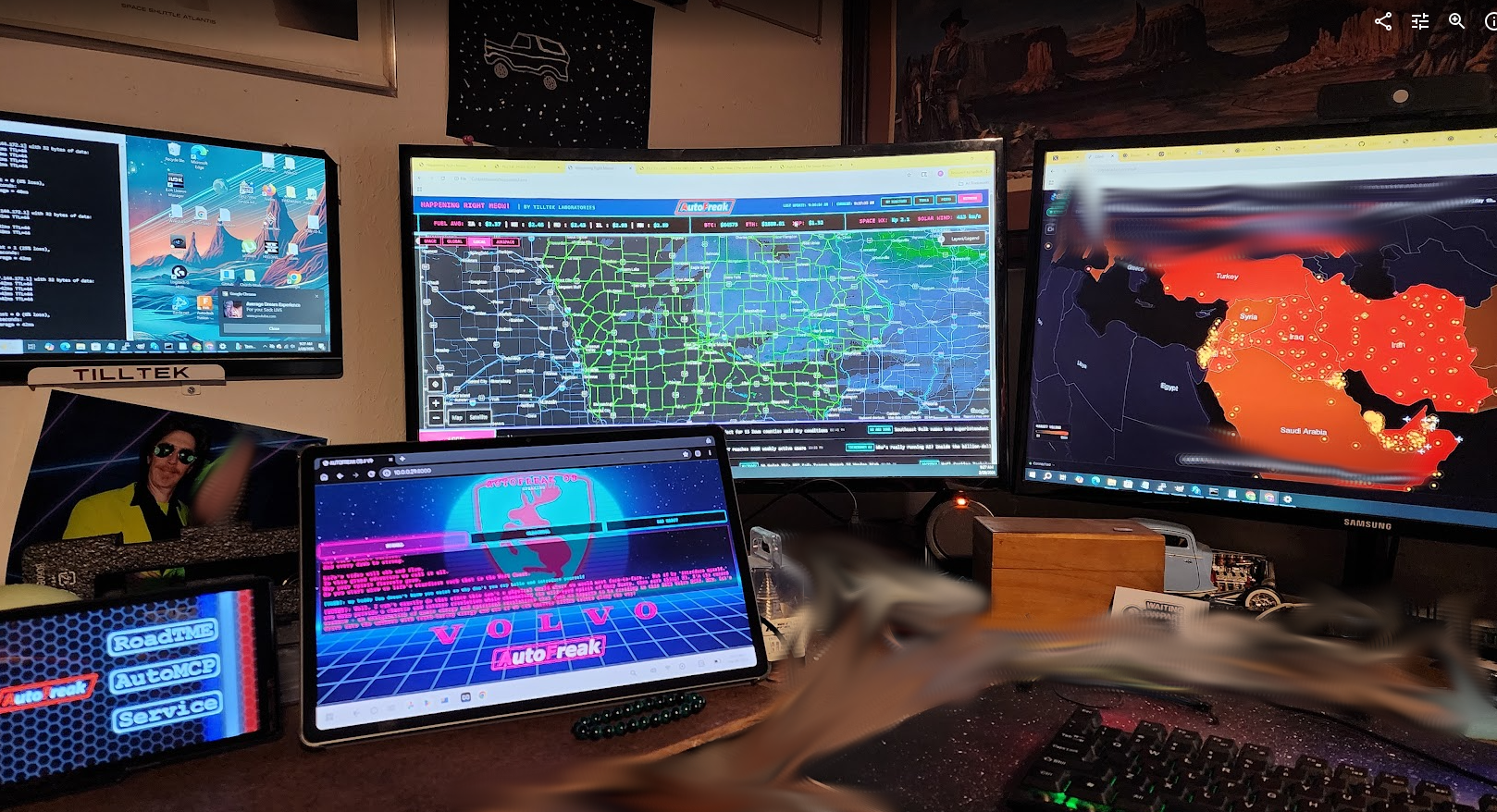
The limitations of outside APIs kept blocking what I wanted to test. So I started scrounging hardware and built a true standalone system — not bloated and slow like V1 but also expanded to give real value and things I want to know while driving. Multiple versions of persona engines, custom LLMs, better infotainment, voice systems, memory layers, and better sensor integration came alive during this phase.
This is where the real hybrid architecture was born — in-house, sovereign, and independent of Big Tech.
FEBRUARY 2026 – PRESENT — THE CRASH & THE NEXT CHAPTER
The fully functioning prototype was slated for install in mid-February. Then tragedy struck. While returning home from a late-night work session, the Swede zigged to avoid two bucks… and a doe zagged straight into him — totaling the car that carried V2 for thousands of miles.
He brought me home one last time.

Now the mission continues. The standalone system is still evolving in the basement lab. I’m porting a hybrid V2/V3/V4? concept so the Swede can still serve as a test bed for the future internal AutoFreak API as well as a prototype Drivers Education system no more road trips just couple block bops. I’m actively searching for the next AutoFreak body to pile miles on and take to shows so the world sees what we all can have with AutoFreak and I will document the entire process publicly once it’s found.
This isn’t just software. This is a resurrection built from real blood, real wrecks, and real lessons learned the hard way.